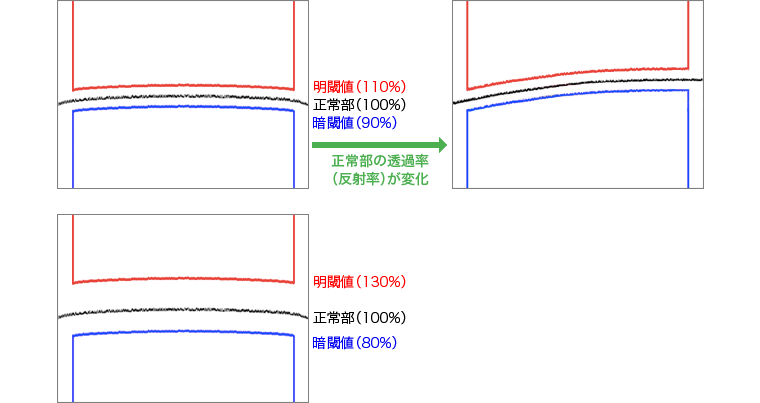
搬送される検査対象製品に対し、ラインセンサーカメラで搬送速度に同期し、1スキャンずつ画像データを取り込みます。取り込んだ画像データは、予め設定した「明/暗」の2つの検出感度(明閾値/暗閾値)と比較(2値化)し閾値を超えたものを、欠陥候補として取り込みます。
- 明閾値を超える場合は、明欠陥候補
- 暗閾値を超える場合は、暗欠陥候補
欠陥候補となった、各スキャン毎の画像データについては、「高速連結処理」を実施し、画像データを製品搬送方向に連結することで、欠陥候補間の繋がりを認識し、欠陥候補毎に位置、面積、幅、長さ、明/暗種類等の特徴量を正確に抽出します。